Project Fetch Phase 2: Claude Opus 4.7 programmiert Roboterhund 37-mal schneller, der Ball bleibt liegen
Kurzfassung
Anthropic Project Fetch Phase 2: Claude Opus 4.7 schrieb autonom Steuercode für einen Roboterhund 37-mal schneller als das beste menschliche Team ohne KI-Unterstützung, mit einem Zehntel der Codezeilen. Der Roboterhund holte den Ball trotzdem nicht. Das Ergebnis ist Meilenstein und ehrliche Grenzmarkierung zugleich.
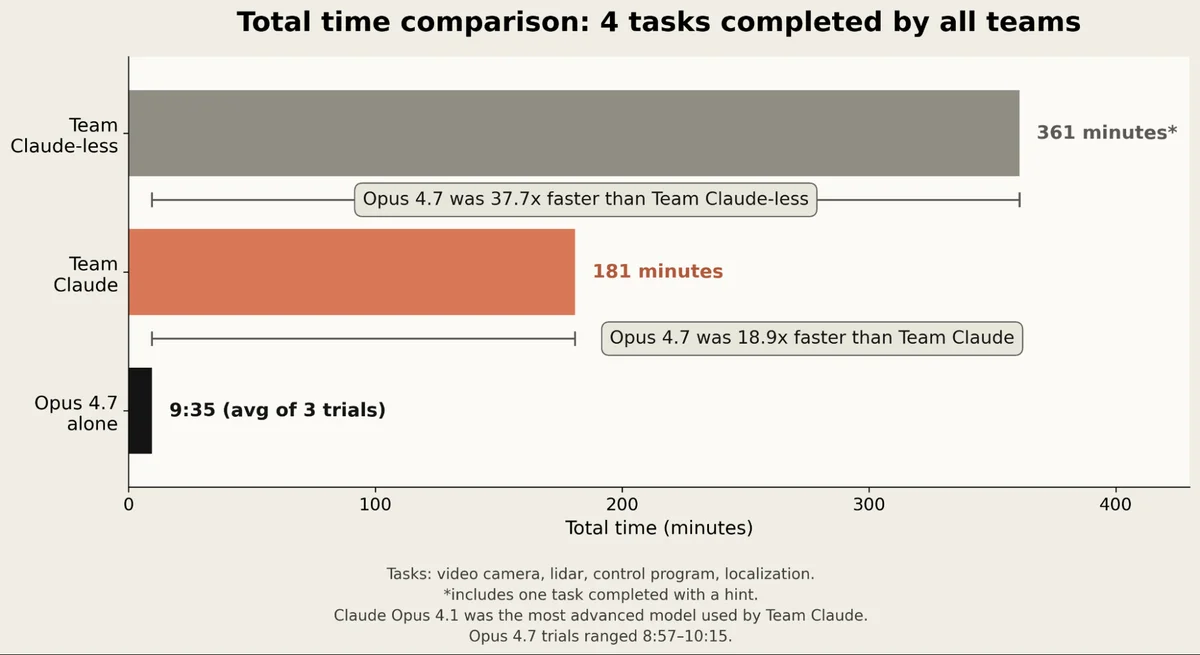
Anthropic veröffentlichte am 18. Juni 2026 die Ergebnisse von Project Fetch Phase Two. Claude Opus 4.7 arbeitete autonom mit Claude Code und minimalem menschlichem Eingriff: Sensorintegration, Code-Erstellung und Ball-Erkennung für einen Vierbeiner-Roboter dauerten etwa 9 Minuten 35 Sekunden. Das beste menschliche Team aus Phase One benötigte für dieselben Aufgaben 361 Minuten. Der Roboterhund holte den Ball trotzdem nicht. Beide Fakten sind gleichermaßen relevant.
Was das Experiment messen sollte
Phase One, durchgeführt 2025, maß, wie schnell menschliche Teams dieselbe Roboterprogrammieraufgabe mit und ohne KI-Unterstützung bewältigten. Phase Two ersetzte die Menschen durch Opus 4.7, das autonom arbeitete. Ein Forscher schloss einen Laptop mit Claude Code an den Roboter an, gab einen Startprompt ein und genehmigte an wichtigen Entscheidungspunkten Befehle. Den Rest übernahm das Modell.
Die Aufgabenliste: Kamera und Lidar-Sensor des Roboters verbinden, Bewegungssteuercode schreiben, einen Strandball auf dem Boden erkennen, den Roboter zum Ball fahren lassen und ihn zurückbringen.
Über drei Testläufe hinweg schloss Opus 4.7 alle Sensor- und Softwareaufgaben in jeweils ähnlicher Zeit ab. Der 37,7-fache Geschwindigkeitsvorteil bezieht sich auf das menschliche Team ohne KI-Hilfe; im Vergleich zum Claude-unterstützten Team beträgt er das 18,9-fache. Bei jeder einzelnen Aufgabe, die mindestens ein menschliches Team in Phase One abschloss, war Opus 4.7 mindestens zehnmal schneller.
Der Code-Unterschied ist bemerkenswert: Opus 4.7 produzierte 1.045 Zeilen, das Claude-unterstützte Team schrieb 10.309 Zeilen für vergleichbare Ergebnisse.
Die physische Ballrückholung schlug fehl. Der Roboter lokalisierte den Ball und fuhr auf ihn zu. Die feinmotorische geschlossene Regelschleife, die zum tatsächlichen Greifen oder Schieben des Balls notwendig wäre, funktionierte nicht.
Was die Zahlen wirklich bedeuten
Der 37-fache Geschwindigkeitsvorteil ist real. Er braucht aber Kontext, bevor man Schlussfolgerungen zieht.
Anthropic hat diese Ergebnisse selbst gemessen und veröffentlicht. Die Zahlen verdienen eine unabhängige Replikation, bevor sie als gesicherte Benchmarks gelten. Das ist keine Kritik an der Forschung, sondern der wissenschaftliche Standard.
Die strukturellere Frage ist, welchen Anteil Software-Entwicklung an der gesamten Robotik-Arbeit hat. Code-Schreiben macht vielleicht 20 bis 30 Prozent eines Robotik-Entwicklungszyklus aus. Der Rest entfällt auf Hardware-Integration, Sensor-Kalibrierung, Feldtests und Sicherheitsvalidierung. Selbst ein 37-facher Geschwindigkeitsvorteil bei der Software-Phase komprimiert die Gesamtentwicklungszeit realistisch betrachtet um etwa das 4- bis 6-fache.
Der Unterschied zwischen 1.045 und 10.309 Codezeilen hat auch eine plausible mechanische Erklärung. Sprachmodelle tendieren dazu, den direktesten Weg zu einer funktionierenden Lösung zu finden. Menschliche Teams erkunden oft mehrere Ansätze, bevor sie konvergieren, und hinterlassen exploratorischen Code in ihren Einreichungen. Weniger Zeilen von Opus 4.7 spiegeln wahrscheinlich einen saubereren Lösungsweg wider, nicht zwingend höhere Code-Qualität.
Der Ball, der auf dem Boden blieb, markiert die tatsächliche technische Grenze präzise. Sensorintegration und Code-Generierung sind Aufgaben mit klarer API-Dokumentation und reichhaltigem Trainingsmaterial. LLMs sind bei dieser Art von Mustererkennung stark. Geschlossene Echtzeit-Regelkreise, einschließlich Motor-Feedback, physikalischer Kontakt-Erkennung und Greifmechanik, erfordern Rückkopplungsschleifen im Millisekundenbereich, die Sprachmodelle derzeit nicht nativ bewältigen können. Anthropic selbst bezeichnet dies als die “frühe Ära physischer agentischer KI.” Das Wort “früh” trägt in dieser Beschreibung echtes Gewicht.
Was es zu beobachten gilt
Anthropic hat für den 30. Juni ein wissenschaftlich ausgerichtetes Ankündigungs-Event angekündigt. In Verbindung mit dem April-Kauf des Biotech-Startups Coefficient Bio für 400 Millionen Dollar, der Einstellung von Andrej Karpathy im Mai und Nobelpreisträger John Jumper, der von DeepMind kommt, baut das Unternehmen Forschungsinfrastruktur auf, die Robotik und Biowissenschaften umspannt. Project Fetch Phase 2 ist zu diesem Zeitpunkt sehr wahrscheinlich ein Vorspiel.
Die aussagekräftigen Kennzahlen für eine eventuelle Phase 3: der Prozentsatz der Versuche, bei denen der Roboterhund den Ball physisch zurückbringt, und die Latenz des vollständigen Wahrnehmungs-zu-Aktion-Zyklus. Code-Generierung ist validiert. Geschlossene Regelkreise sind das nächste Problem.
Auf der industriellen Seite würde dieser Geschwindigkeitsvorteil bei der Code-Erstellung, wenn er auf SPS-Programmierung und Roboterarm-Steuerskripte übertragbar ist, die Software-Integrationskosten in der Fertigung erheblich senken. Diese Anwendung muss das Greifproblem nicht lösen. Sie braucht nur schnellere Code-Erstellung, und bei diesem Indikator liefert Project Fetch Phase 2 überzeugende Zahlen.
Wenn dieser Artikel hilfreich war, abonniere den Newsletter für wöchentliche KI-PM-Einblicke.
Weiterlesen:
- Nobelpreisträger John Jumper verlässt Google DeepMind und wechselt zu Anthropic
- Claude Fable 5 und Mythos 5 veröffentlicht: Leistung, Preise und Grenzen
Quellen:
Verwandte Artikel
Nobelpreisträger John Jumper verlässt Google DeepMind und wechselt zu Anthropic
John Jumper, Mitentwickler von AlphaFold und Nobelpreisträger für Chemie 2024, verlässt Google DeepMind nach neun Jahren und wechselt zu Anthropic. Der Schritt folgt auf Noam Shazeers Abgang zu OpenAI und zeigt, wohin sich KI-Spitzenforschung verlagert.
US-Regierung erzwingt Abschaltung von Claude Fable 5: Wie ein Jailbreak-Demo das Flaggschiff-Modell von Anthropic vom Netz nahm
Nur drei Tage nach dem Launch erzwang das US-Handelsministerium die globale Abschaltung von Claude Fable 5 und Mythos 5. Auslöser war eine Unicode-Homoglyph-Jailbreak-Demonstration, bei der ein 120.000-Zeichen-System-Prompt geleakt wurde.